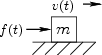
Figure B.1 depicts a free mass driven by an external force along
an ideal frictionless surface in one dimension. Figure B.2
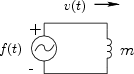
shows the electrical equivalent circuit for this scenario in
which the external force is represented by a voltage source emitting
volts, and the mass is modeled by an inductor
having the value Henrys.
Figure B.1:
Physical diagram of an external force driving a mass
along a frictionless surface.
Figure:
Electrical equivalent circuit of the
force-driven mass in Fig.B.1.
we can solve algebraically for , the Laplace transform of the
mass position for all . This Laplace transform can then be
inverted to obtain the mass position for all . This is
the general outline of how Laplace-transform analysis goes for
all linear, time-invariant (LTI) systems. For nonlinear and/or
time-varying systems, Laplace-transform analysis cannot, strictly
speaking, be used at all.
If the applied external force is zero, then, by linearity of
the Laplace transform, so is , and we readily obtain
we find that the position of the mass is given for all time by
Thus, for example, a nonzero initial position and zero
initial velocity results in for all ; that
is, the mass ``just sits there''.B.3 Similarly, any initial velocity is integrated with
respect to time, meaning that the mass moves forever at the initial
velocity.
To summarize, this simple example illustrated use the Laplace
transform to solve for the motion of a simple physical system (an
ideal mass) in response to initial conditions (no external driving
forces). The system was described by a differential equation which
was converted to an algebraic equation by the Laplace transform.
![\begin{eqnarray*}
F(s) &=& m\,{\cal L}_s\{{\ddot x}\}\\
&=& m\left[\,s {\cal L...
...right\}\\
&=& m\left[s^2\,X(s) - s\,x(0) - {\dot x}(0)\right].
\end{eqnarray*}](img1666.png)
![$\displaystyle u(t)\isdef \left\{\begin{array}{ll}
0, & t<0 \\ [5pt]
1, & t\ge 0 \\
\end{array}\right.,
$](img1673.png)