 |
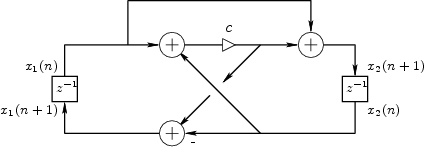
As an example of state-space analysis, we will use it to determine the frequency of oscillation of the system of Fig.E.3 [90].
Note the assignments of unit-delay outputs to state variables ![]() and
and ![]() .
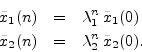
From the diagram, we see that
.
From the diagram, we see that
![$\displaystyle \left[\begin{array}{c} x_1(n+1) \\ [2pt] x_2(n+1) \end{array}\rig...
...ay}\right]}_A \left[\begin{array}{c} x_1(n) \\ [2pt] x_2(n) \end{array}\right]
$](img2172.png)
![\begin{eqnarray*}
y_1(n) &\isdef & x_1(n) = [1, 0] {\underline{x}}(n)\\
y_2(n) &\isdef & x_2(n) = [0, 1] {\underline{x}}(n)
\end{eqnarray*}](img2174.png)
A basic fact from linear algebra is that the determinant of a
matrix is equal to the product of its eigenvalues. As a quick
check, we find that the determinant of ![]() is
is
Note that
![]() . If we diagonalize this system to
obtain
. If we diagonalize this system to
obtain
![]() , where
, where
![]() diag
diag![]() ,
and
,
and ![]() is the matrix of eigenvectors of
is the matrix of eigenvectors of ![]() ,
then we have
,
then we have
![$\displaystyle \underline{{\tilde x}}(n) = \tilde{A}^n\,\underline{{\tilde x}}(0...
...t[\begin{array}{c} {\tilde x}_1(0) \\ [2pt] {\tilde x}_2(0) \end{array}\right]
$](img2180.png)
If this system is to generate a real sampled sinusoid at radian frequency
![]() , the eigenvalues
, the eigenvalues ![]() and
and ![]() must be of the form
must be of the form
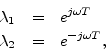
(in either order) where ![]() is real, and
is real, and ![]() denotes the sampling
interval in seconds.
denotes the sampling
interval in seconds.
Thus, we can determine the frequency of oscillation ![]() (and
verify that the system actually oscillates) by determining the
eigenvalues
(and
verify that the system actually oscillates) by determining the
eigenvalues ![]() of
of ![]() . Note that, as a prerequisite, it will
also be necessary to find two linearly independent eigenvectors of
. Note that, as a prerequisite, it will
also be necessary to find two linearly independent eigenvectors of ![]() (columns of
(columns of ![]() ).
).